
咨询热线:
咨询热线:
发布时间: 2024-06-17 发布人:成功案例
李亚琦,秦 斌,王 欣 (湖南工业大学 电气与信息工程学院,湖南 株洲 412008)
摘 要:研究了磁悬浮小球系统的控制问题,未解决传统PID操控方法在磁悬浮小球控制过程中调节效果不理想,鲁棒性较差,易受外界扰动而失去稳定的问题,采用了一种基于鲁棒控制的方法来进行系统的控制,鲁棒控制算法能解决磁悬浮系统在外界干扰的情况下使系统保持预期的性能要求。将传统PID控制与现代H∞鲁棒控制进行仿真比较,通过仿真根据结果得出利用鲁棒H ∞ 控制管理系统可提升磁悬浮系统的响应速度,降低系统超调量,较少外界干扰对系统的影响,更好地改善了磁悬浮系统的动态性能。
*文章部分由国家自然科学基金(61673166)和湖南省自然科学基金(2017JJ4022和2018JJ4070)资助。
磁悬浮技术是一种先进的技术,现如今磁悬浮技术在迅猛的发展。近几年来,磁悬浮列车在我国交通运输中占据了主体地位,很多种磁悬浮列车模型被提出[1]。与其他技术相比,磁悬浮技术量具有损耗低,成本低的特点,发展这项技术符合我国的可持续发展战略[2]。磁悬浮系统是一种典型的非线性,开环不稳定的系统。磁悬浮控制算法的研究已经引起了技术界的关注。为了更好地研究磁悬浮系统,通过实验室磁悬浮小球装置来进行研究。对于磁悬浮小球控制算法,传统的有PID控制[3]、串级控制[5],这些控制算法不能很好地满足系统的动态性能的需求。而现代控制算法中,鲁棒控制算法[4]在某些特定的程度上能够很好地满足系统的需求。
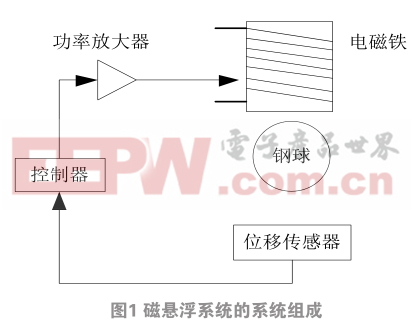
磁悬浮系统的组成最重要的包含五大部分:电磁铁、位置传感器、功率放大器、控制器以及被悬浮对象。系统组成部分如图1所示:
磁悬浮系统主要是利用的电磁铁来实现被悬浮对象在平衡位置的悬浮,位移传感器主要是获得钢球的位置信号,该信号作为控制器的输入信号经过控制算法计算出相应的输出控制信号,控制器输出的控制信号经过功率放大器转变成控制电流,从而使钢球在电磁场中获得磁力来保证小球处于平衡状态。
磁悬浮系统[9]中的电磁力主要是通过电磁铁采用电流励磁方式,再配合磁悬浮小球的导磁特性,在空间构成磁力线回路而产生的。
其中,N为线圈匝数; I 为线圈电流;X为气隙间距;lfe为铁芯回路的平均长度:S(A)为铁芯的截面积
鲁棒控制算法[7-8,15]是一种现代控制算法,是利用这种算法设计的控制器能够使系统在外界干扰的情况下还能保持稳定性。在20世纪80年代初,Zames最先用语言描述了其的基本概念[5],自此 H∞控制器得到了迅速的发展。下文主要利用鲁棒 H∞操控方法来进行磁悬浮系统控制器的设计。
本文进行 H∞控制器设计的时候,主要是通过选择合理的加权函数来进行,选择的加权函数需要满足系统的动态性能指标以及稳态性能指标。 H∞加权灵敏度的选择问题可用图3表示:
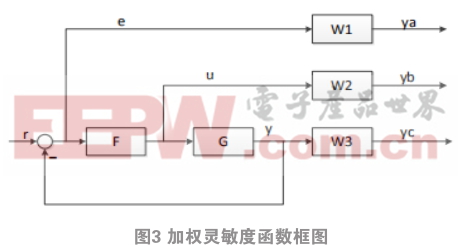
其中,r为参考输入;e为误差,u为控制输入, y为输出,y= [yaybyc]T,其中 W1、W2、W3是3个要设计的加权灵敏度函数。

其中, L=GF,F为鲁棒控制器;G为磁悬浮系统的开环传递函数;S为灵敏度。灵敏度越小意味着磁悬浮系统的误差e越小;令T=I-S,定义为补灵敏度,T的大小直接影响着系统的稳定性。在进行控制器设计的时候,主要是权衡T与S。
在进行磁悬浮控制管理系统设计时,设计的核心是保证系统在增加控制器之后不仅能满足系统的稳态性能,还能使函数P的无穷范数最小。
根据加权灵敏度函数的框图(图3),得到 H ∞ 加权混合灵敏度[11]问题的标准框架为:
要有低通滤波特性,根据磁悬浮实际的系统分析,系统干扰一般发生在低频段,为了更好地保证系统鲁棒性,要使S的增益加大,并且要保证 W
应该具有高通特性,也就是上升的速率要比较大,以此来实现系统的高频抗干扰的特性。
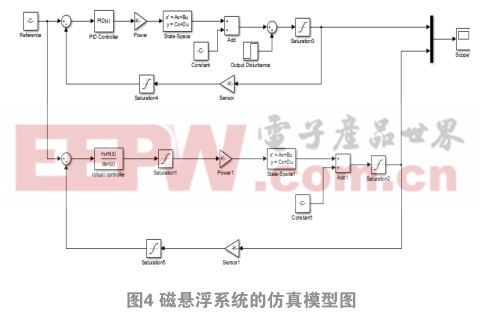
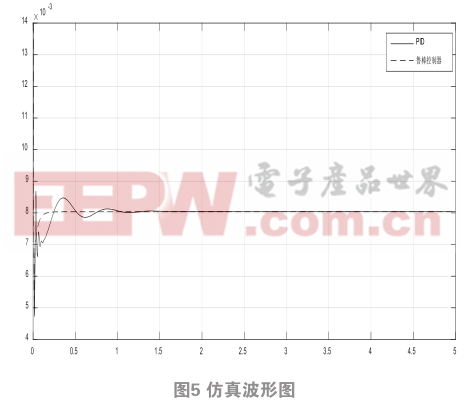
通过MATLAB/Simulink仿真模块对系统来进行模型的建立与仿真。为了验证鲁棒控制器的优越性,将其与传统的PID控制 [12-13] 作对比,建立的模型如图4所示:
= 0,Kd= 0,令KP=1,不断调节Kp,当Ku(kp) = −0.586的时候,系统出现临界等幅震荡,临界震荡的周期 T = 0.1s 。再经过微调得出PID控制器的3个参数。
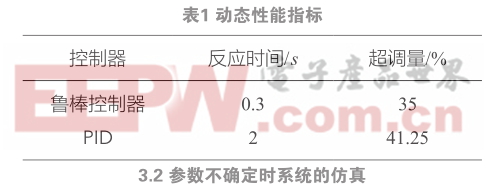
从表1可知:与传统的控制器相比,应用鲁棒控制器调节时间指标与超调量指标都优于PID控制器。
为了更好地验证鲁棒控制管理系统的稳定性,改变系统参数磁悬浮小球的质量来进行系统的仿真与分析:
从表2分析:当参数发生明显的变化的时候,鲁棒控制器的动态性能优于PID控制器的动态性能。
给系统在3s的时候外加一个阶跃干扰信号,PID控制器与鲁棒控制器的仿线所示。
根据图7分析,当外加干扰的时候,鲁棒控制器相对于PID控制器来讲,能使系统在很短时间内恢复稳定。
磁悬浮系统是一种强非线性,建模困难的一种系统,并且系统的运行容易受到外界环境的干扰。本文主要就这样一些问题进行了分析,对磁悬浮系统来进行建模,并且设计了一种 H ∞ 鲁棒控制管理系统。实验分析表明,当系统参数改变时,鲁棒控制器比PID控制器动态性能更好;当系统受到外界干扰时,鲁棒控制器系统也能够迅速地回到稳定值。
[5] 岳婷婷,石红瑞,曹南.基于 H = 最优灵敏度的串级控制研究与应用[J].石油化学工业自动化.
[8] 曹广忠,潘剑飞,黄苏丹,等.磁悬浮系统控制算法及实现[M].北京:清华大学出版社,2013.
[9] 刘克平,吴建军. H = 鲁棒模糊控制在磁悬浮球系统中的应用[J].长春工业大学学报(自然科学版),2008(4):366 370 − .
[11] 程武山.智能控制理论方法与应用[M].北京: 清华大学出版社,2009.
本文来源于科技期刊《电子科技类产品世界》2019年第10期第37页,欢迎您写论文时引用,并标注明确出处。

扫码获取最新资讯


